

【Konnex】ロボットの物理作業をスマートコントラクトで契約・検証・決済まで自律実行できるRoboFiプラットフォーム / @konnex_world
RoboFi実現へ向けたユースケースが出てきた

おはようございます。
web3リサーチャーのmitsuiです。
今日は「Konnex」についてリサーチしました。
Konnexとは?
プラットフォーム構造
想定ユースケース
変遷と展望
RoboFi実現へ向けたユースケースが出てきた
TL;DR
Konnexは、ロボットの物理作業をスマートコントラクトで契約・検証・決済まで自律実行できるRoboFiプラットフォーム
共通タスク言語(UTL)とPoPW(物理作業証明)により、異なるロボットやAIが人手なしで信頼可能に協働できる
ステーブルコインによる実務決済とKNXトークンによる検証・ガバナンスを分離した設計で、現実世界の労働をスケールさせることを目指す
Konnexとは?
「Konnex」は、ロボットによる物理作業とブロックチェーン技術を融合させたプラットフォームです。ロボットがオンチェーンのスマートコントラクトにデジタル署名して仕事の契約を交わし、タスクの受発注から結果検証・決済までを自律的に行えるよう設計されています。
以下、アーキテクチャの全体像です。
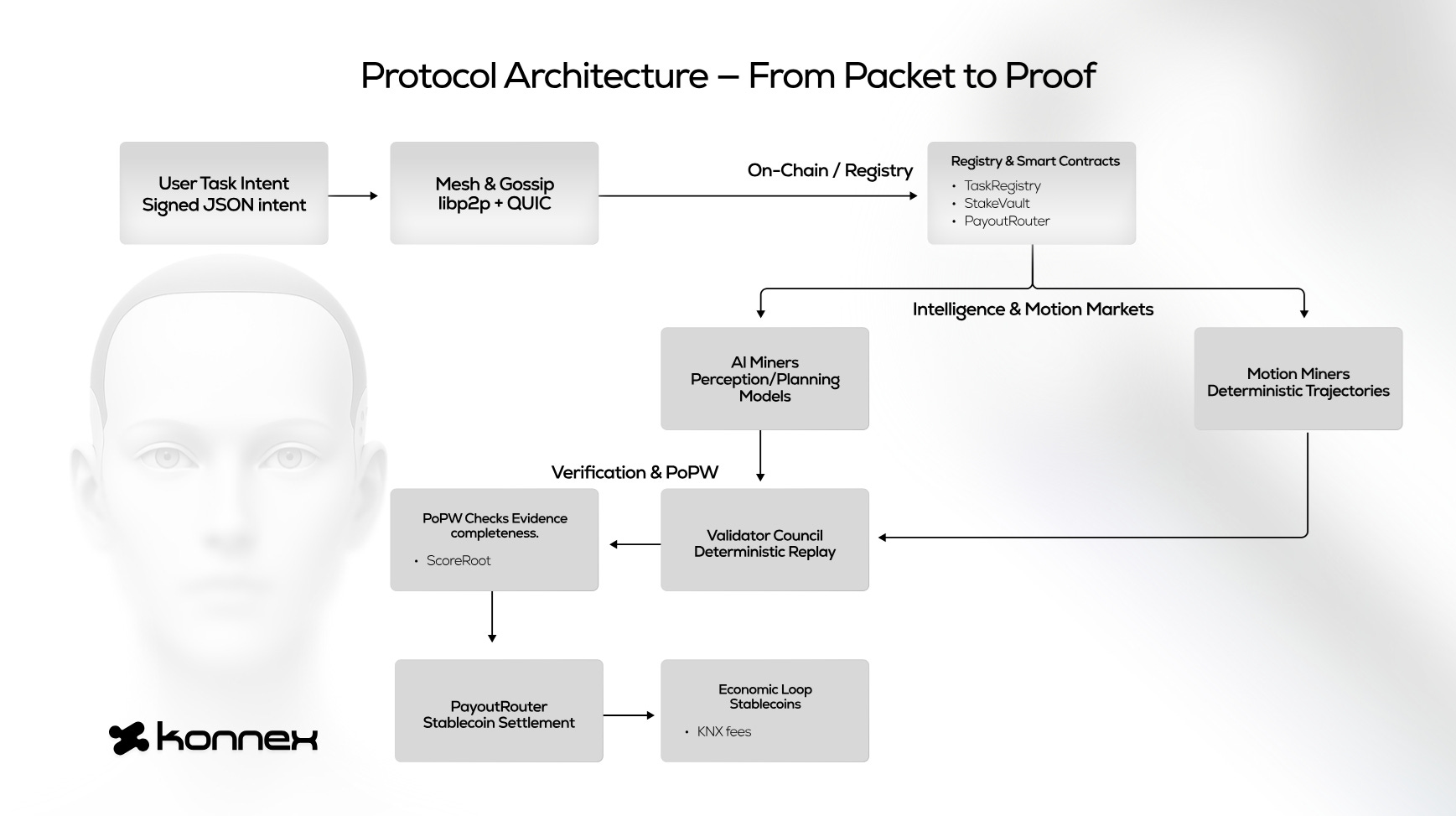
簡単に説明していきます。
まず、低遅延のP2Pメッシュネットワーク(QUIC/libp2p)上でロボット間通信を行い、各タスク要求はJSON形式の「ユニバーサル・タスク言語(UTL)」で記述されます。
UTLによりメーカー固有の仕様に依存しない共通タスク記述が可能となり、ロボット同士やAIモデル間で統一的に理解・協調できるようになります。このようにタスク文法の標準化によってベンダーロックインを排除し、異なるロボットやAIが同じ言語で指示・情報交換できるのが特徴です。
ブロックチェーン上ではProof-of-Physical-Work(PoPW)と呼ばれる仕組みにより物理作業の完了証明を行います。
各タスク契約には作業内容や期限、報酬額に加えて、依頼側・作業側双方が担保として預けるステーブルコイン保証金が記録されます。ロボット(作業者)は作業実行中にセンサーデータや映像ログを記録し、完了後にPoPWバンドル(センサー記録や短い動画クリップなど)をアップロードします。
ネットワーク上のバリデータ(検証者)がその証拠データを審査し、スマートコントラクトに定められた条件通りに作業が遂行されたか検証します。
例えば配送タスクなら「GPS移動経路+配達完了現場の写真」、調理タスクなら「温度ログ+フライパン内の画像」、点検作業なら「高解像度の検査部位画像」など、作業タイプに応じた証拠が求められます。バリデータ多数決により作業完了が認められればPoPW承認となり、信頼できる実行証跡としてブロックチェーンに記録されます。
これによって人間の立会いなしにロボットの成果を信用検証できるようになり、結果に基づく自動精算が可能になります。
Konnexの通信層・契約層・検証層は上記のように連携し、ロボット同士が人間の仲介無しに「仕事の合意→実行→完了証明→支払い」まで完結できる技術構成になっています。
全ての決済は価格変動の少ないステーブルコイン建てで行われ、作業報酬・違約金・デポジット返還などは安定した価値で扱われます。
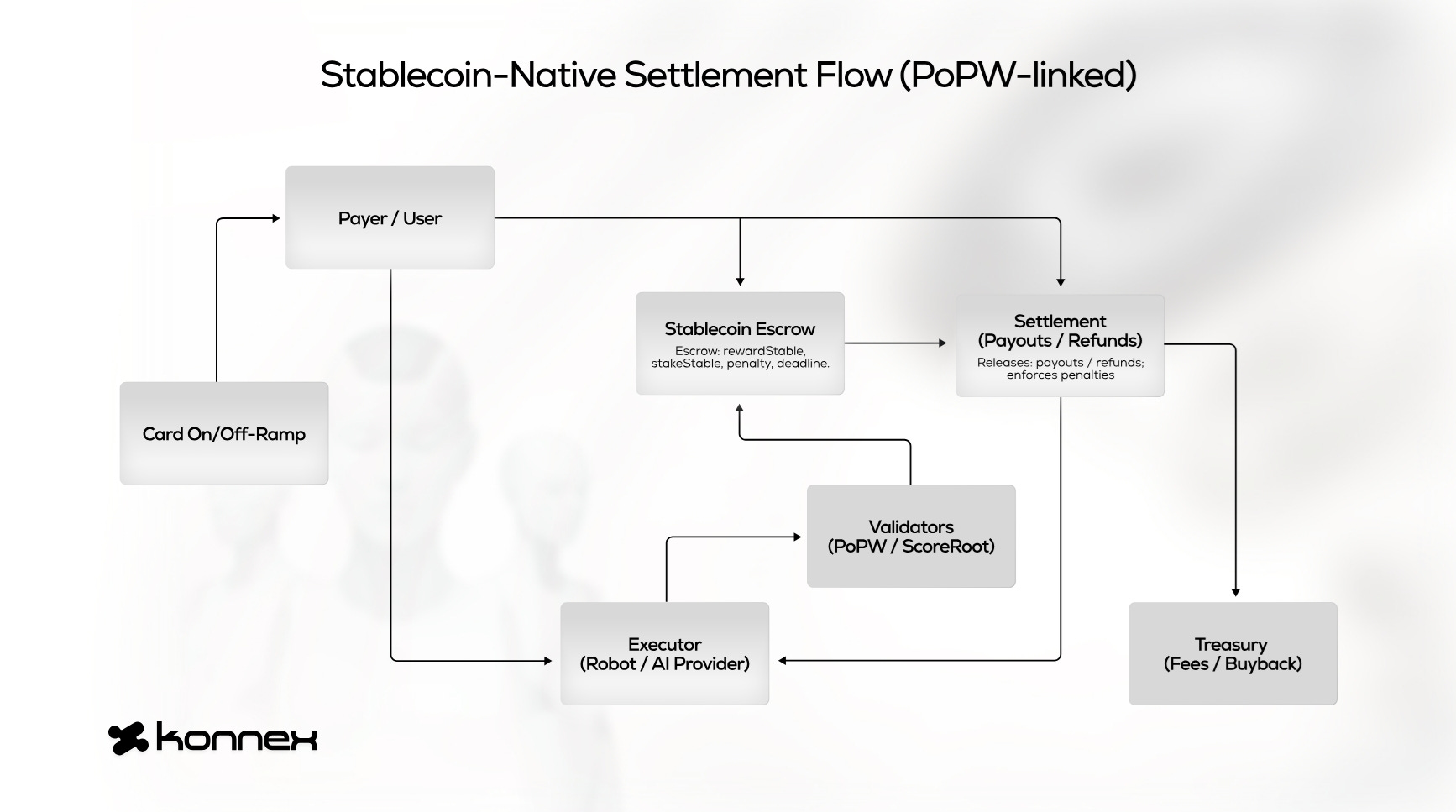
一方でネットワーク手数料やガバナンス投票にはプラットフォーム独自トークンである「KNX」(コネックス)を用いる二層構造です。
KNXはセキュリティ担保や手数料支払い、将来的なガバナンス投票権として機能し、PoPW検証者もKNXをステークしてネットワークの誠実性を示します。
このようにKonnexは、ロボティクスの制御・センサー技術とブロックチェーンの信頼基盤を組み合わせ、物理的な作業の合意履行をプログラム可能かつ検証可能にする革新的なアーキテクチャを実現しています。
プラットフォーム構造
上記ではロボット同士が自律的にタスクをこなすアーキテクチャについて説明しましたが、Konnexはタスクの依頼や受注をマッチングさせるロボットのためのマーケットプレイスとしても機能します。
需要側(タスク依頼者)はプラットフォーム上に仕事(タスク)を投稿し、供給側(ロボットのオーナーやロボット自体)はそれに対して入札・受注する形です。
さらに特徴的なのは、単にロボットと依頼者をマッチングするだけでなく、AI開発者も参加する三者市場を作っている点です。
例えば、あるタスク(例:スープを作る)が投稿されると、バックエンドでは複数のAI開発者(ポリシー提供者=“AIマイナー”)が自分の制御アルゴリズム・AIモデルを提案し競合します。
これら提案ポリシーはシミュレーション環境で一度検証され、最も性能が良いと評価されたものがロボットにデプロイされ実行されます。
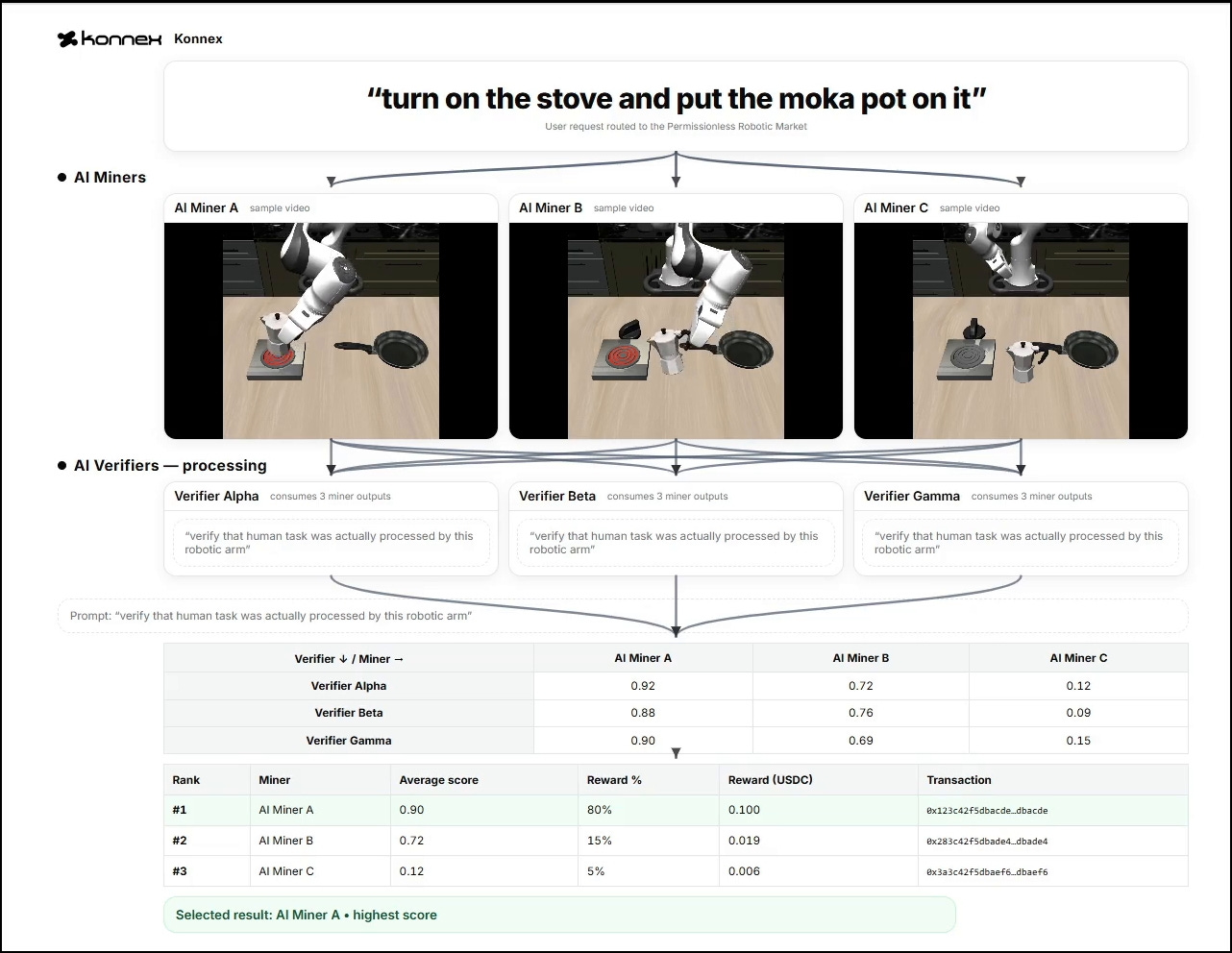
このようにKonnexは、ロボットの持ち主(物理作業の提供者)とAIアルゴリズムの提供者(知能の提供者)の双方が参加し、依頼されたタスクを最適に遂行できるAI制御を市場原理で選抜する仕組みを備えています。
AI開発者は自らのアルゴリズムを作業に適用してもらうことで報酬を得られ、ロボット側は最適な知能をオンデマンドで利用できるという双方向のインセンティブが働きます。
この知能マーケットと物理労働マーケットが統合された構造により、Konnexはロボットの知能のライセンス供与と作業請負を一体化した新しい経済圏を目指しています。
◼️取引フロー
プラットフォーム上の取引フローは以下の通りで、スマートコントラクトによって管理されます。
①オファー(Offer)
タスクの依頼者が仕事内容・期限・報酬額(ステーブルコイン建て)を提示し、ジョブを公開します。この時点で依頼者側も契約保証金を預託します(報酬額とは別に小額のデポジットをステーブルコインでロックします)。
②ビッド(Bid)
そのジョブを実行可能なロボットたちが応札します。それぞれETA(到着・完了予測時間)や自身の現在位置、提案する保証金額などを提示します。ロボットの信頼度(過去の実績)に応じて要求される保証金が変動し、実績豊富なロボットほど少ない担保で入札できます。
③マッチング(Match)
依頼者が入札の中から一つを選定すると、マッチング成立です。スマートコントラクト上で依頼者の報酬額とロボット側の保証金がエスクロー(ロック)されます。この際、わずかなネットワーク手数料(KNX建て)が発生します。
④実行(Execute)
ロボットは指定されたタスクを実行します。実行中はセンサーデータや行動ログをコンパクトなスナップショット形式で記録し続けます。例えば一定間隔で位置や画像を記録したり、動作完了時に写真を撮る等、後述の証明に必要なデータを蓄積します。
⑤証明(Prove)
タスク完了後、ロボット(またはバックエンドシステム)はPoPW証明バンドルをブロックチェーンにアップロードします。これはジョブID(各タスクにユニークに付与されたハッシュID)と紐付けられており、対応するセンサー記録ログや短い映像・画像などを含みます。
第三者のバリデータがオフチェーンでこの証拠を精査し、所定の達成基準を満たしているか評価します。複数検証者のスコアや合意に基づき、最終的なPoPW確定(可決 or 不可)が下されます。
⑥清算(Settle)
検証で作業完了が確認されれば、スマートコントラクトは即座に決済を行います。エスクローされていた報酬額ステーブルコインがロボットのオーナーに支払われ、双方の保証金デポジットは解除されて返還されます。
逆に期限遅れや証拠不十分など失敗と判定された場合、ロボット側の保証金は没収(スラッシュ)され依頼者に返金・賠償されます。またその失敗記録はオンチェーン上に公開され、ロボットの信用スコアに反映されます。
Konnexのバリデータは誤った検証(失敗タスクを誤って承認する等)を防ぐため、自らもKNXトークンとステーブルコインを担保に差し出しており、不正な承認を行えばそのステークを失う仕組みです。
以上のように、Konnexではスマートコントラクトがジョブの募集から支払い・違約金精算まで一連のフローを自動執行します。
スマートコントラクトの主要な役割としては、ロボットの公開鍵に紐付く「RobotIdentity」コントラクトで身元認証と信用スコア管理を行い、「TaskRegistry」コントラクトで各タスクのエスクロー金や締切・ペナルティ条件を記録します。
さらに「StakeVault」でバリデータの二重ステーキング(KNXとステーブルコイン)を管理し、「PayoutRouter」で検証結果に応じた即時支払い処理を実施する、といったモジュールが用意されています。
これらの契約はEthereum互換のブロックチェーン上で稼働すると考えられ、ブロックごとにジョブの進捗や検証スコア(ScoreRoot)が書き込まれ、不変で透明性のある履歴を形成します。
想定ユースケース
Konnexが想定しているユースケースは多岐にわたり、物流、製造、農業、インフラ点検、サービス業などリアルの物理作業全般が対象となります。

プラットフォームのビジョンは「物理労働をソフトウェアと同じ流動性でスケールさせる」ことであり、従来は人手に頼っていた様々な現場作業を自律ロボットとブロックチェーンによって代替・効率化することを目標に掲げています。
以下、Konnexが提示している具体的なユースケース例を挙げます。
◼️物流・配送
ドローンや自動走行ロボットが小包や食品を配達する世界です。
例えば、複数のドローンと地上ロボットが協調してエリア内の配送タスクを分担し、各ロボットがGPS経路ログや配達完了写真をPoPW証拠として提出、検証通過後に即座に報酬が支払われるような流れを想定しています。
◼️農業・環境モニタリング
農地での自動化も重要なユースケースです。農業分野で、播種ロボット・生育モニタードローン・収穫ロボットなどが共有データに基づき連携し合う未来を想定しています。
例えば、圃場を巡回するロボットが土壌センサーやカメラでデータを収集し、その精度や有用性に応じてAIモデル提供者に報酬を支払う(モデルの予測精度に対する成功報酬)といった仕組みです。
また農業機械間で相互にデータ検証しあうことで、廃棄やムダを削減する「レスポンシブ農業」の実現を目指すとされています。ロードマップでも農業試験がフェーズ2で予定されており、作物管理や自動収穫の分野で実証実験が行われる見通しです。
◼️製造・倉庫
倉庫内在庫管理ドローンや工場ラインの搬送ロボットもターゲットです。
例えば、倉庫内で棚卸を行うドローンが在庫データをスキャン・記録し、クラウド上のAIが不一致を検出した場合は自律フォークリフトに補充作業を発注する、といった分業協調が考えられます。ロードマップには倉庫でのパイロットも明記されており、実際に物流センターなどでKonnexシステムを試験導入する計画です。
◼️インフラ点検・警備
ドローンやクローラーロボットによるインフラ設備の点検もユースケースに含まれます。例えば、橋梁の腐食調査を市当局がKonnexで発注し、複数の点検ロボットが各センサーデータを収集、結果を高解像度画像付きレポートとしてPoPW提出するケースです。
検証者がそれらを一括評価し、問題箇所が網羅的に検出されたことが確認できれば報酬支払い—といった流れになります。このように公共インフラ監視や警備巡回など人手不足領域でのロボット活用にも適用できます。
◼️サービス業(配膳・調理・介護等)
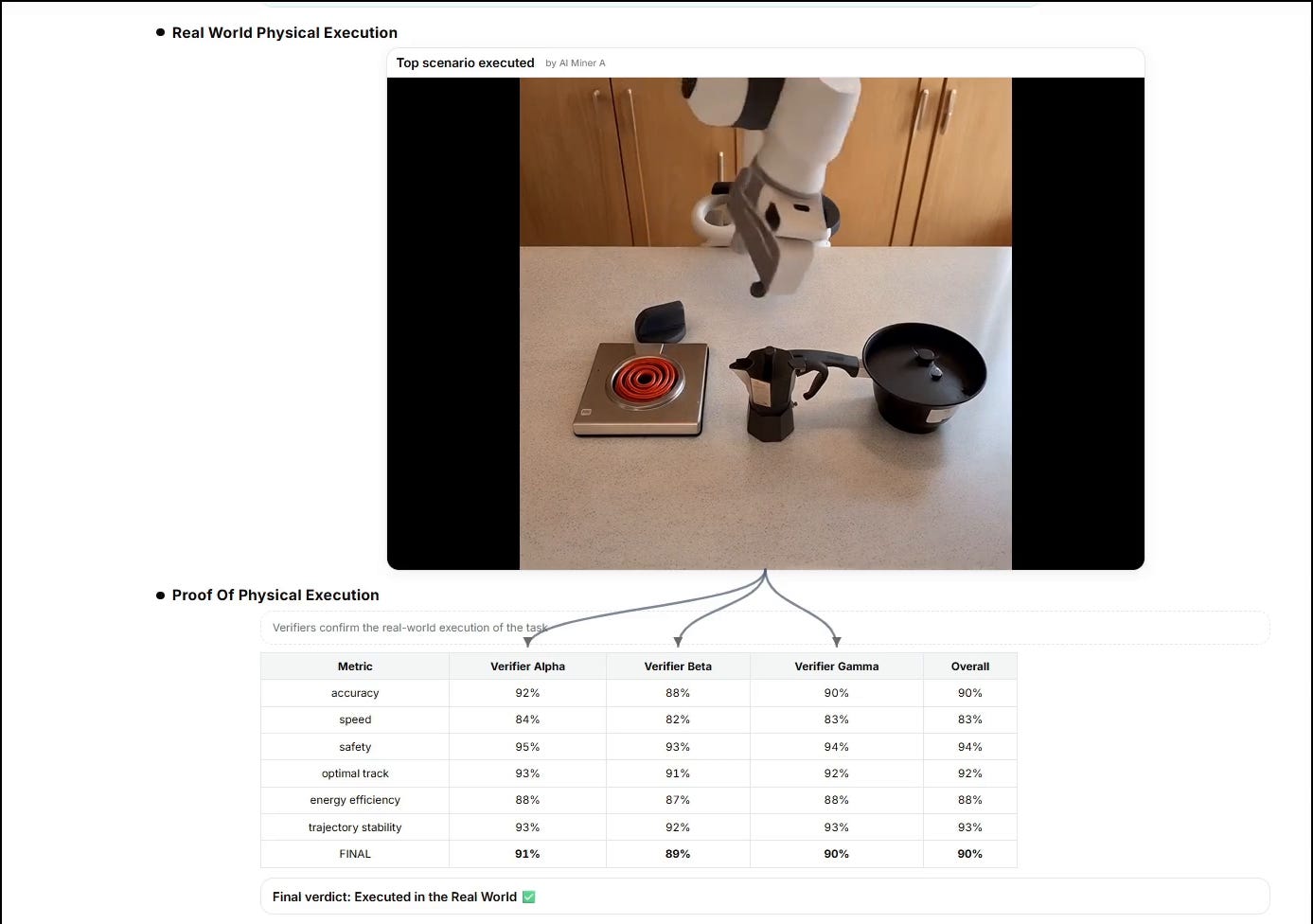
家庭や飲食店でのサービスロボットにも応用が考えられます。公式サイトでは「ロボットキッチン」の例として、調理ロボットアームが料理を作り、鍋の温度や腕のトルクデータを逐次モニタして適切に調理できたら自動で支払いされる、というシナリオが示されています。
実際にKonnexの将来像では、ユーザーが「○○を2人前作って」と命じるとロボットがKonnex上のマーケットから適切な調理AIモデルをダウンロードし(AI提供者にステーブルコインで使用料を支払い)、調理実行後にPoPW検証クリアで報酬支払いとレシピ著作権料の分配まで完了するという流れが描かれています。
このように、将来的にはレストランの自動厨房や一般家庭の調理支援ロボ、さらには介護支援ロボットの動作ログ検証(正しく投薬した証拠を記録する等)など生活・サービス分野にも応用が期待されます。
◼️まとめ
以上のように、Konnexが念頭に置くユースケースは非常に幅広いです。同社も「実世界の労働経済全般(約25兆ドル規模)をターゲットにしている」と述べており、産業領域では製造・物流、社会領域ではインフラ・農業、サービス領域では家庭・飲食といったあらゆる分野での活用を視野に入れています。
ただし、現時点でこれら全てが実現しているわけではなく、まずは実証実験やパイロットプロジェクトを通じて技術検証を進める段階です。
変遷と展望
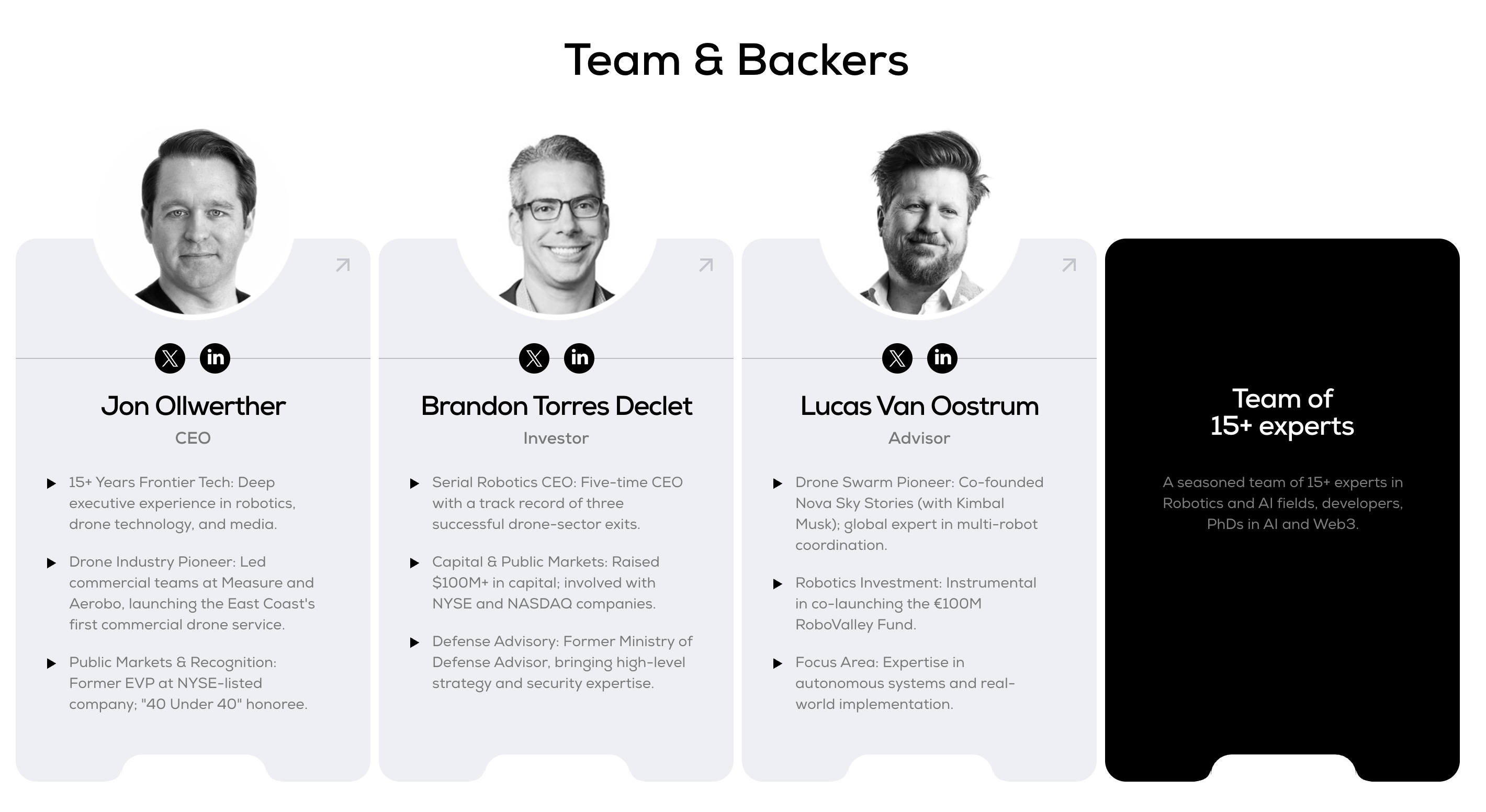
Konnexは2025年創業のスタートアップで、ロボティクスとブロックチェーン双方の専門家を揃えたメンバーによって構成されています。
CEOを務めるのはJon Ollwerther氏です。彼は15年以上にわたりフロンティア技術分野に携わってきた起業家・経営者であり、メディア業界とロボティクスの両面で経験を有します。
Strategic Supporterとしてチームを支えるのがBrandon Torres Declet氏です。彼は5度のCEO経験を持つ連続起業家で、ドローン・ロボティクス・国防分野のエキスパートです。米国防総省や政府とも関わりが深く、Measure社(北米最大のドローンサービスプロバイダに成長)のCEOや、NYSE上場企業AgEagle Aerial SystemsのCEOを歴任しました。
Strategic AdvisorにはLucas Van Oostrum氏が名を連ねます。オランダ出身の彼はドローンスウォームのパイオニアであり、複数ロボットの協調制御における世界的専門家です。イーロン・マスクの弟Kimbal Musk氏と共同でドローンショー企業Nova Sky Storiesを創設したほか、欧州のロボットイノベーション拠点「RoboValley」の立ち上げにも寄与しました。
また、2026年1月中旬に初めて外部資金調達ラウンドを公表し、1,500万ドルの資金調達に成功しました。

このラウンドは戦略的出資に位置付けられ、出資元にはCogitent Ventures、Liquid Capital、Leland Ventures、Covey Network、M77 Ventures、Block Maven LLCといったクリプト・新興技術領域のVCや投資家グループが名を連ねています。
◼️ロードマップ
Konnexは明確なロードマップを掲げており、2025年から今後数年間の開発マイルストーンが4つのフェーズに区切られています。各フェーズの目標と計画されている展開は以下の通りです。
Phase 0:テストネットスプリント(0〜6か月)
主な目的
Konnexが技術的に本当に動くかを証明する
「ロボットが仕事をして、証明して、USDで支払われる」までを一気通貫で確認する
やること
タスク → 入札 → 実行 → PoPW検証 → USD決済、のエンドツーエンド検証
ロボット用シミュレータ(KitchenSim / RackSim)の提供
PoPW(物理作業証明)の試作・検証ロジック構築
ステーブルコインによるエスクロー/報酬/ペナルティ処理の実装
デュアルステーキング設計(KNX+ステーブルコイン)の設計
検証者(バリデータ)のスラッシュルール定義
SDK v0.9 提供(CLI・Python・API)
初期AIマイナー(開発者)コミュニティの立ち上げ
成功率・検証時間など基礎KPIの取得
Phase 1:メインネットMVP(6〜12か月)
主な目的
安全に使える最小限のメインネットを立ち上げる
開発者・ロボットが「実際に使える」状態にする
やること
タスクスキーマ v1.0 の確定(仕様凍結)
主要スマートコントラクトの外部セキュリティ監査
バリデータ評議会(Validator Council)の立ち上げ
デュアルステーキングを伴うPoPW検証ネットワーク稼働
ステーブルコイン(USDC等)による本番決済開始
手数料の一部をKNX買い戻し/トレジャリーに回す仕組み導入
Miner Bootcamp(AIマイナー向け教育・OSS公開)
初の実機ロボットによるパイロット運用
クレジットカード → ステーブルコインのオンランプβ提供
検証精度SLA(誤判定率 < 1%)の設定
Phase 2:産業パイロット(12〜24か月)
主な目的
実産業で「経済的に意味がある」ことを証明する
企業・研究機関が使えるレベルに引き上げる
やること
倉庫・農業分野での実証実験(物流・在庫・農機連携)
大学ロボット(ローバー)群による協調実験
PoPW対応センサー拡張(IMU、LiDARなど)
大容量証拠データ対応(IPFS / S3 アンカー)
BondMatrix v1(第三者がロボットに保証金提供できる仕組み)
スワーム(群制御)対応
複数ロボットでの共同入札
報酬分配(Fee Split)
KYC/AMLのオン・オフトグル(企業・政府対応)
クロスチェーン対応(他L1/L2のステーブルコイン利用)
開発者グラント配布(トレジャリーの一部を還元)
信頼スコア改善による保証金削減(コスト最適化)
Phase 3:グローバル・モーション・レジャー(24〜48か月)
主な目的
世界規模の「ロボット労働インフラ」になる
中央運営なしでも回る自律分散経済を完成させる
やること
PoPW / PoPE v3(センサー非依存・汎用証明フレームワーク)
ロボット動作・軌道データの再利用とロイヤリティ設計
AIモデル/モーションプラグインの二次市場形成
法定通貨(クレカ・請求書)による大規模決済対応
企業向けステーブルコイン請求・会計対応
KNXによる本格ガバナンス開始
手数料率
ステーク要件
プロトコルアップデート
地域別ステーブルコイン保証プール(規制対応)
コミュニティ主導運営への完全移行
以上のように現時点でKonnexはメインネット立ち上げ直後の成長期にあり、プロトコルの洗練と現実世界での適用範囲拡大が同時に進められています。
RoboFi実現へ向けたユースケースが出てきた
最後は総括と考察です。
昨年からクリプト領域以外でもフィジカルAIやロボティクスのトレンドが少しずつ出てきました。それに伴い、クリプト領域でもRoboticsとブロックチェーンを組み合わせたRoboFiというカテゴリが誕生しました。
今回リサーチしたKonnexもRoboFi領域の1つであり、ファウンダー陣のトラックレコードを鑑みてもかなり期待感のあるプロジェクトだと考えられます。
ただし、Konnexのロードマップを見ても分かる通り、一歩ずつ着実な進歩を掲げているので、想像されているようなロボティクス同士、AI同士の自律的な交渉・契約・タスク実行・支払い・レビューは数年間はかかるのではないかと思います。
それでも、いずれ来るであろうロボティクス同士が強調する世界においてはブロックチェーンが基盤になるとは思います。それは単に支払いのことだけでなく、ロボットのIDや所有管理と評判、タスクの実行の検証なども含めて、分散型で実施した方が効率が良いことが非常に多いからです。
個人的に、この10年間でブロックチェーンが検証してきたことの中にバリデーターによる分散型検証の仕組みと思想があると思っています。トークンをステークして分散型で検証し報酬が得られるという仕組みはあらゆることに応用が可能で、今回のKonnexのタスク検証にも利用されています。
なので、この領域は気長に待ちつつブロックチェーンが社会インフラとして実装されていく世界をリサーチし続けたいと思います。
以上、「Konnex」のリサーチでした!
参考リンク:HP / DOC / X
«関連 / おすすめリサーチ»




免責事項:リサーチした情報を精査して書いていますが、個人運営&ソースが英語の部分も多いので、意訳したり、一部誤った情報がある場合があります。ご了承ください。また、記事中にDapps、NFT、トークンを紹介することがありますが、勧誘目的は一切ありません。全て自己責任で購入、ご利用ください。
About us:「web3 for everyone」をコンセプトに、web3の注目トレンドやプロジェクトの解説、最新ニュース紹介などのリサーチ記事を毎日配信しています。
Author:mitsui @web3リサーチャー
「web3 Research」を運営し、web3リサーチャーとして活動。
Contact:法人向けのリサーチコンテンツの納品や共同制作、リサーチ力を武器にしたweb3コンサルティングや勉強会なども受付中です。詳しくは以下の窓口よりお気軽にお問い合わせください。(📩 X / HP)
→お問い合わせ先はこちら